Robot Hazır Hava Tahrikli Tutucu, Tek
6,06 lb Maksimum Kavrama Kapasitesi
| Robot Hücresi Bileşeni | Kavrama |
| Bileşen | Tek Tutucu |
| Robot Kolu Üreticisi için (Seri/Model No.) | FANUC (CRX 5iA, 10iA, 10iA/L, 20iA, 25iA, 30iA) Universal Robots (UR3e; UR5e; UR10e; UR16e) ABB (CRB 15000 10/1.52) |
| Sinyal Türü | Dijital |
| Elektrik Bağlantısı Tipi | Tapa |
| Fiş Tipi | 12 Kutuplu Mikro M12 |
| Kodlama | A |
| Montaj Konumu | Robot Kolunun Ucu |
| Çıkış Sayısı | 2 |
| Giriş Sayısı | 4 |
| Hava Aktüatör Türü | Lineer Kılavuz |
| Uygulama | Kaldırma için |
| Sıkma Şekli | Paralellik |
| Çene Geri Dönüş Mekanizması | Basınçlı Hava |
| Çene Malzemesi | Alüminyum |
| Kavrama Konumu | Dahili, Dış |
| Maksimum Kavrama Kapasitesi | 6.06 lbs. / 2.75 kg |
| Dış Kavrama Kuvveti | 123 lbs. @ 87 psi |
| İç Kavrama Kuvveti | 137 lbs. @ 87 psi |
| Kavrama Açılma/Kapanma Süresi | 700 ms |
| Strok Genişliği | 16 mm |
| Saniyede Maksimum Döngü Sayısı | 14 |
| Maksimum Parmak Aralığı | 43 mm |
| Maksimum Tutma Uzunluğu | 110 mm |
| Ağırlık | 2.18 lbs. / 0.99 kg |
| Montaj Deliği Düzeni Uyumluluğu | ISO 50 |
| Montaj Türü | Cıvatalı |
| Cıvata Deliği Çapı | 6 mm |
| Cıvata Deliği Diş Boyutu | M6 × 1 mm |
| Cıvata Deliği Sayısı | 4 |
| Montaj Donanımı Dahil | Evet |
| Toplam | |
| Uzunluk | 116 mm |
| Genişlik | 99 mm |
| Derinlik | 100 mm |
| Maksimum Basınç | 100 psi6.9 bar |
| Bağlantı noktası | |
| Adet | 1 |
| Cins | Dişi |
| Boru | |
| Bağlantı Tipi | Tak ve Bağlan |
| Dış Çap | 6 mm |
| ID | 4 mm |
| Uzunluk | 32 ft. |
| Malzeme | Poliüretan Plastik |
| Piston Malzemesi | Alüminyum |
| Conta Malzemesi | Buna-N Kauçuk |
| Gövde Malzemesi | Alüminyum |
| Kablo Uzunluğu | 16 ft. |
| Kablo Uç Tipi | Dişli × Tel Uçları |
| Kablo Soketi | |
| Tip | 12 Kutuplu Mikro M12 |
| Kodlama | A |
| Kablo Dahil | Evet |
| Üretici ile Uyumlu | FANUC, Universal Robots, ABB |
| Parmak Yapısı | 2-Finger |
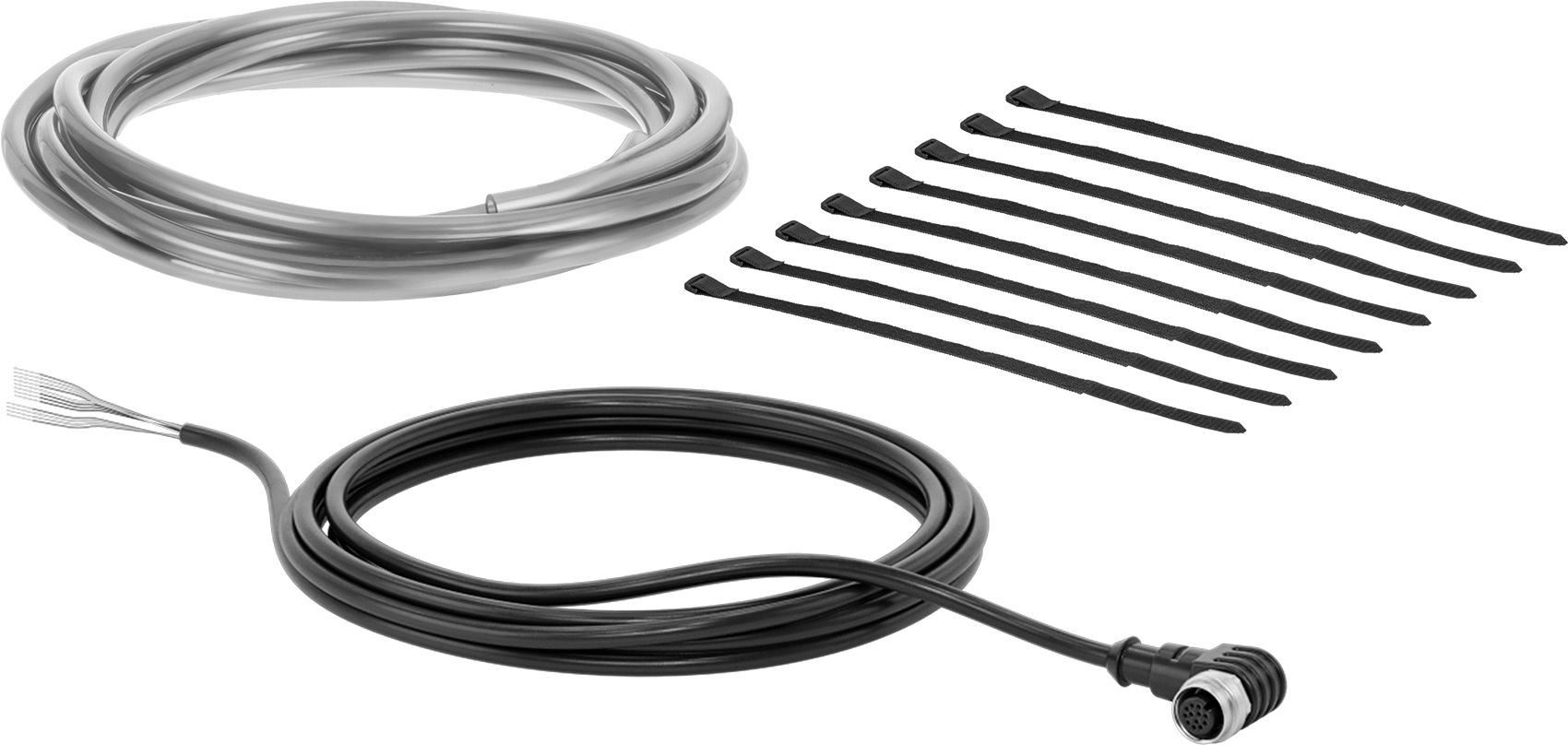
| İçerir | One MTB SG-JGP-P-80-1 Gripper One CNK-SG/DG-RF1 Robot Mounting Kit (Arm Mounting Adapter, Connecting Cable, Compressed Air Hose, Four 18" Hook-and-Loop Straps) Four M5 × 10 mm Finger Mounting Screws |
| Sinyal Çıkış Türü | PNP |
| Güç Kaynağı | Hava |
| Gerilim | 24V DC |
| Sıcaklık Aralığı | 45° ila 120° F |
| Üretici (Seri/Model Numarası) | Schunk (MTB DG-JGP-P 80-1) |
| RoHS | Uygun Değil |
| REACH | Uygun Değil |
| Menşe Ülke | Almanya |
| Schedule B | 847990.9640 |
| ECCN | EAR99 |
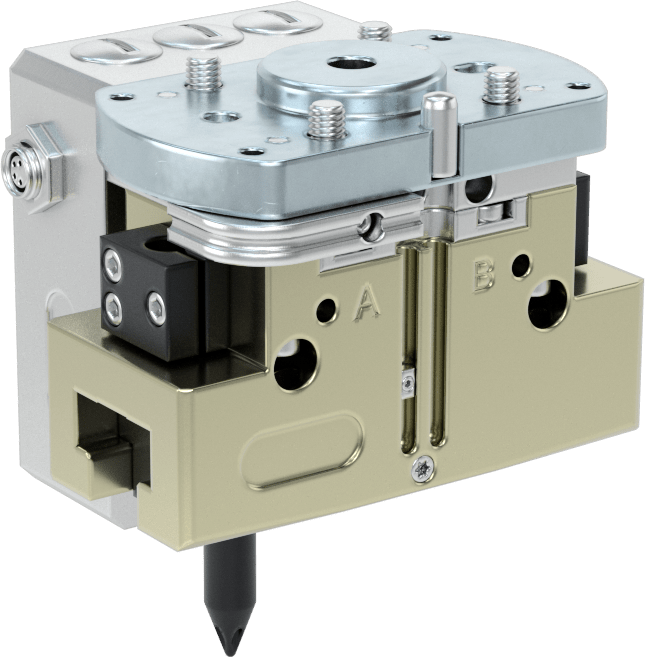
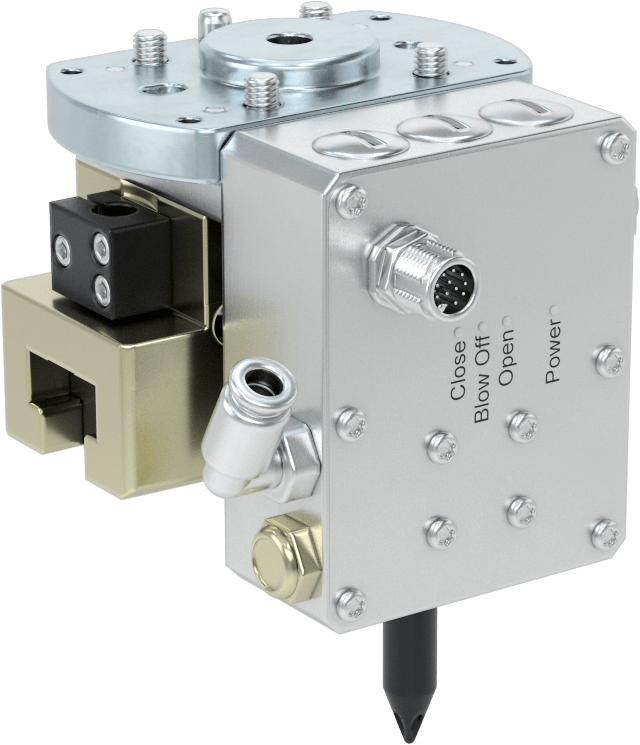
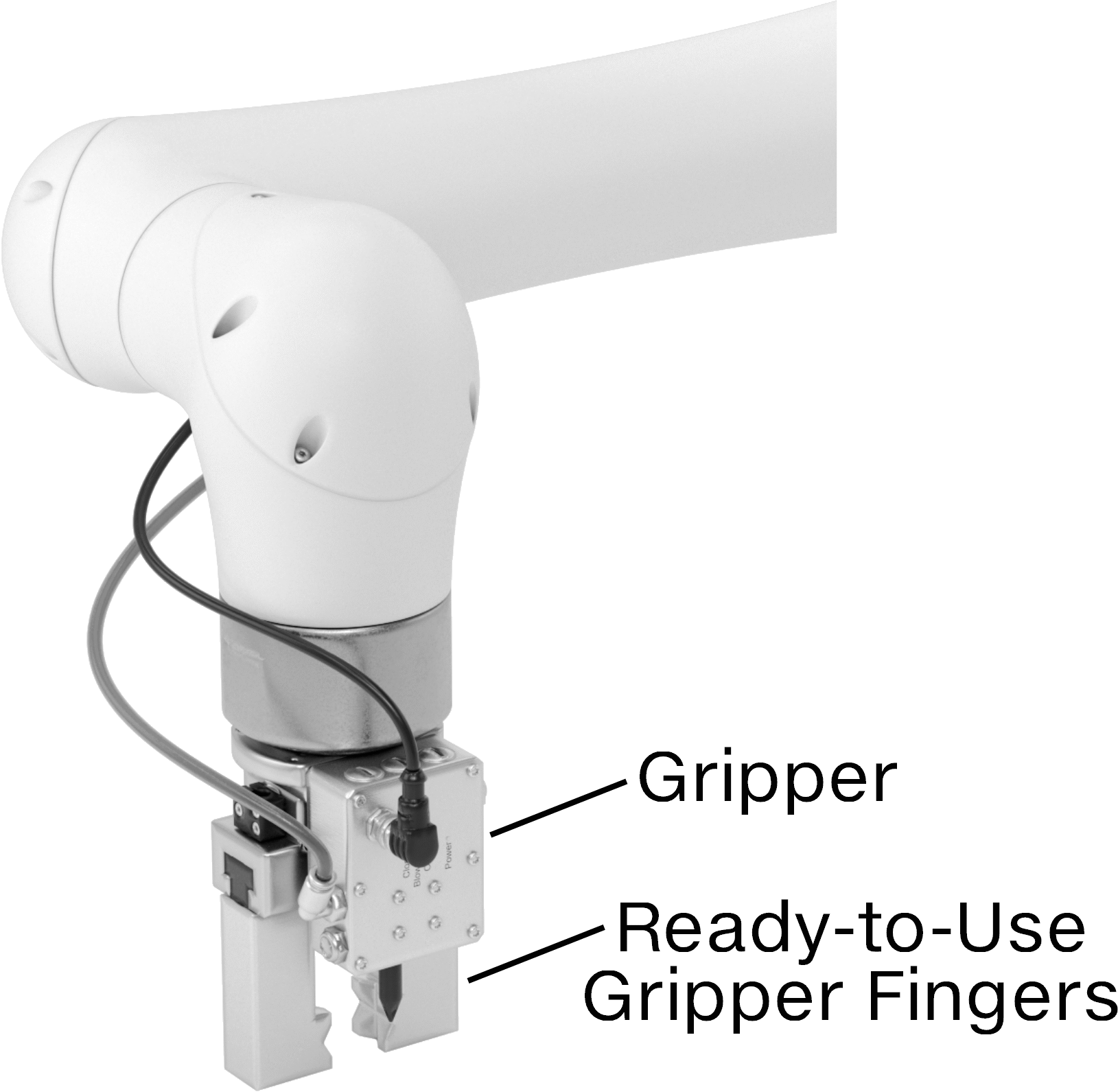
Basınçlı hava ile çalışan bu tutucular, makine besleme, paketleme ve montaj işleri için parçaları alır ve yerleştirir. Robotunuza bağlamak için ihtiyacınız olan her şeyle birlikte gelirler ve dahili hava kontrol vanaları, karmaşık harici sistemlere olan ihtiyacı ortadan kaldırır. Birlikte verilen hortumu hava kaynağınıza bağlayın ve her şeyi robotunuzun yazılımı üzerinden kontrol edin. Bu tutucular parçaları içten veya dıştan alır; örneğin, içi boş bir parçayı içten veya içi dolu bir parçayı dıştan alır. Ayrıca, parçayı almadan önce kalıntıları temizleyen dahili bir üfleme nozulu da bulunur.
Bu tutucular, FANUC CRX, Universal Robot (UR) ve ABB kolları için özel olarak tasarlanmış robot montaj aparatı, elektrik bağlantıları ve yazılım eklentileriyle birlikte gelir. Parmakları ekleyin, tutmaya hazır olsunlar. Kullanıma hazır parmaklar ayrı olarak satılır.
İşbirlikçi robotlara uygun kıskaçların aksine, bu kıskaçlar yüksek kuvvetlerle çalışır. İşbirlikçi robotunuzun yakınında çalışıyorsanız, ek güvenlik önlemleri almanız gerekebilir.
Bu tutucular, robot kontrol ünitenizdeki terminallere bağlanan kablo uçlarına sahip uzun bir elektrik kablosuyla birlikte gelir. Bu tutucuları öğretme kolunuzdan kontrol etmek için yazılım eklentisini kullanın. Ardından, öğretme kolunuzu kullanarak tutucuları açıp kapatabilir ve hava üfleme nozülünü açıp kapatabilirsiniz.
Bu tutucuların IP67 sınıfı kontrol kutusu, elektrikli bileşenleri soğutma sıvısından korur. Ayrıca çeneleri IP40 sınıfındadır, bu sayede işleme sırasında oluşan talaş gibi katı nesneler hareketlerini engellemez.
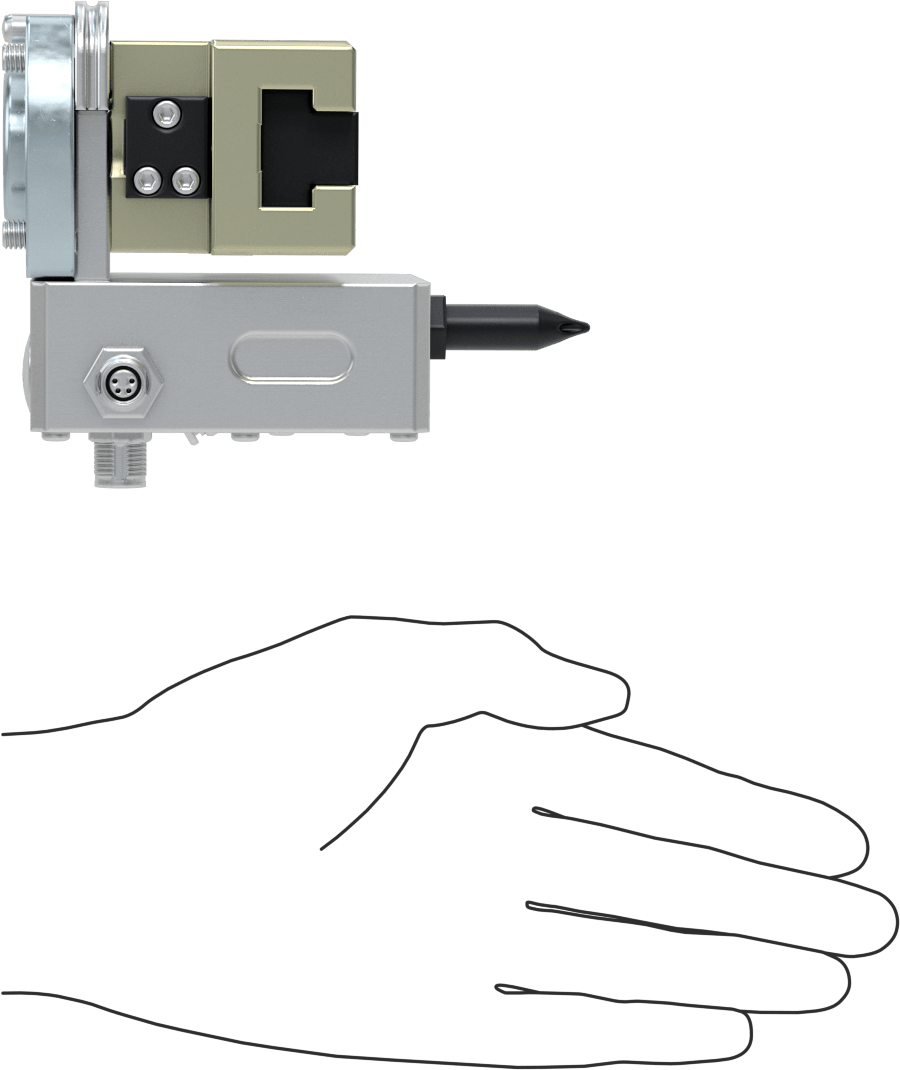
Basit alma ve yerleştirme işlemleri için tek parmaklı bir tutucu seçin. Bu tutucu, her seferinde tek bir parçayı tutar.
Strok genişliği, tutucu parmakların açıldığında veya kapandığında hareket ettiği toplam mesafedir.