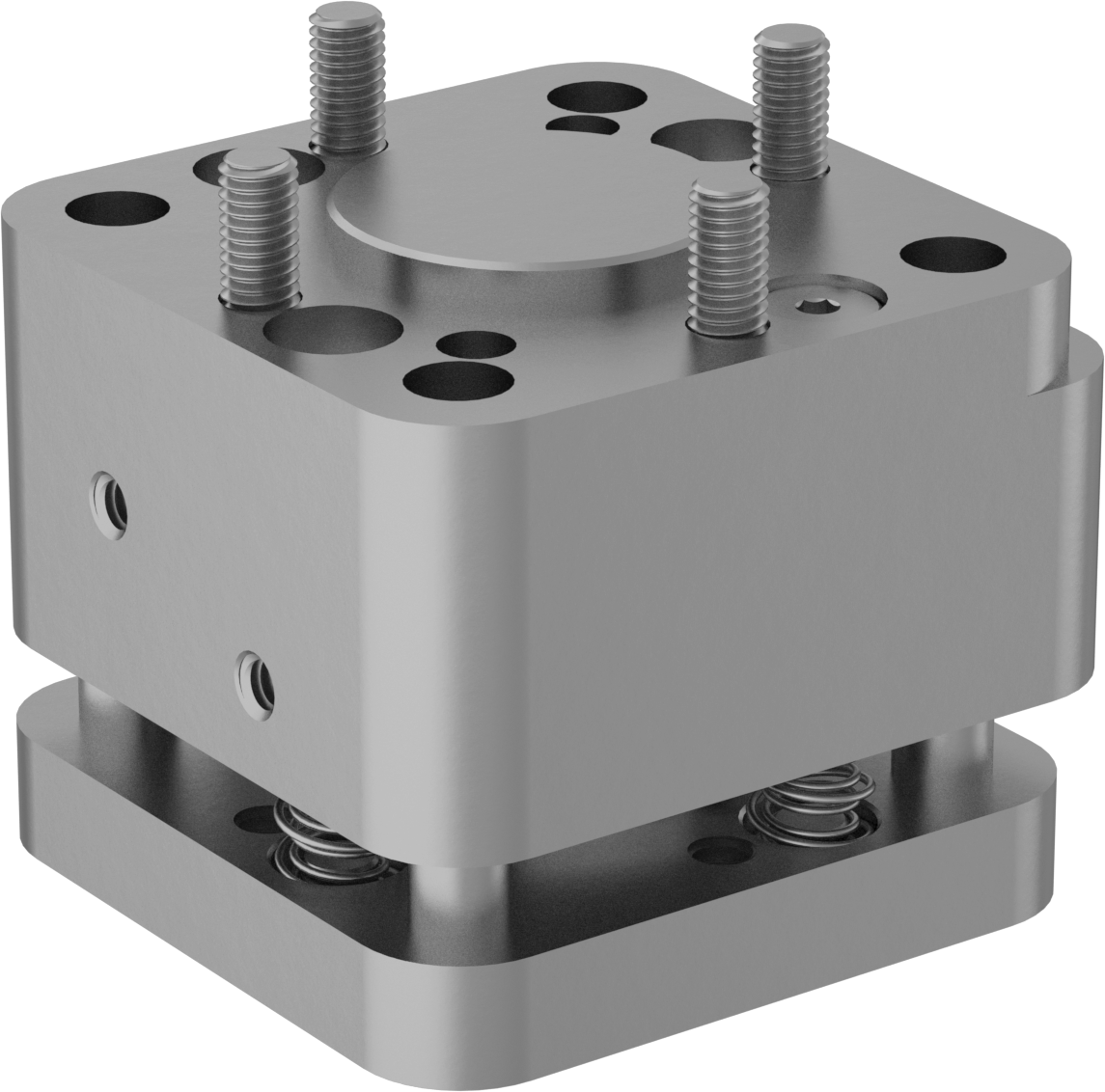
Robot Hazır Tutucu Dengeleme Cihazı, Z Ekseni için
4,5 ila 9 lbs. Yay Kuvveti
| Robot Hücresi Bileşeni | Dengeleme Cihazı |
| Çalıştırma | Hava, Yay |
| Gövde Malzemesi | Eloksallı Alüminyum |
| Toplam | |
| Uzunluk | 53 mm |
| Genişlik | 64 mm |
| Derinlik | 64 mm |
| Dengeleme Ekseni | Z |
| Z Ekseni Telafisi | ±8 mm |
| Yay Kuvveti Aralığı | 4.5-9 lbs. /2-4 kgf |
| Kilitleme Kuvveti | |
| Uzatılmış | 110 lbs. @87 psi |
| Geri çekilmiş | 65 lbs. @87 psi |
| Ağırlık | 1,2 lbs. / 0,55 kg |
| Sıcaklık Aralığı | 45° F ila 140° F |
| Robot Kolunun Ucu İçin | |
| Montaj Türü | Cıvatalı |
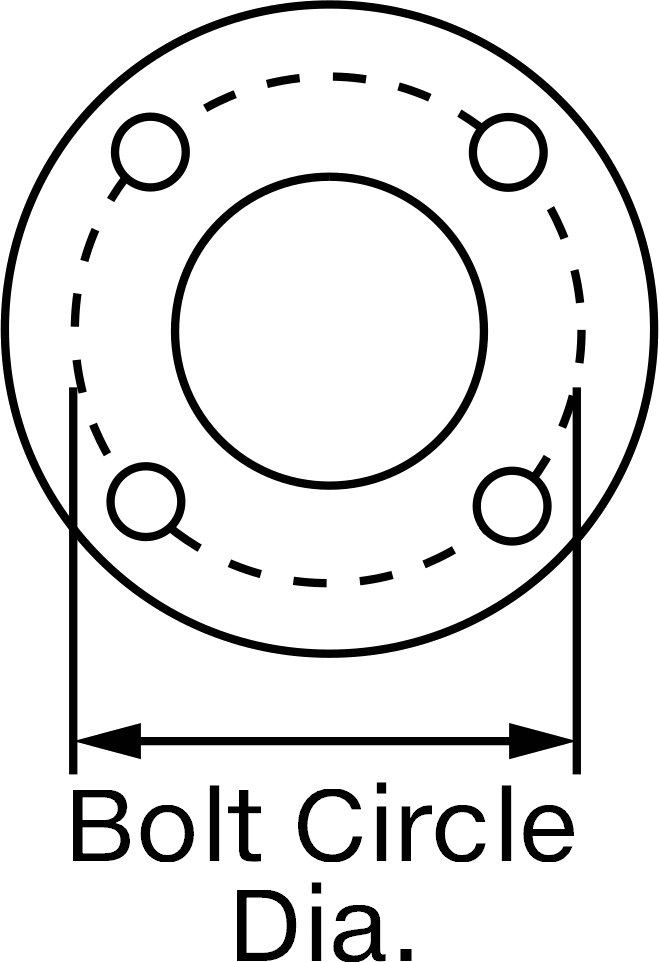
| Cıvata Çember Çapı (Montaj Deliği Deseni Uyumluluğu) | 50 mm(ISO 50) |
| Cıvata Deliği Diş Boyutu (Adet) | M6 × 1 mm (4) |
| Dahil Edilen Montaj Bağlantı Elemanları | Evet |
| Kavrama için | |
| Montaj Türü | Cıvatalı |
| Cıvata Çember Çapı (Montaj Deliği Deseni Uyumluluğu) | 50 mm(ISO 50) |
| Cıvata Deliği Diş Boyutu (Adet) | M6 × 1 mm (4) |
| Dahil Edilen Montaj Bağlantı Elemanları | Hayır |
| Hava Girişi Bağlantı Tipi | Dişli |
| Hava Girişi Cinsiyeti | Dişi |
| Hava Girişi Diş Boyutu | M5 × 0.8 mm |
| Hava Girişi Diş Tipi | Metrik |
| Hava Giriş Basıncı Aralığı | 36-87 psi |
| Hava Giriş Sayısı | 2 |
| Yük Kapasitesi | 11 lbs. / 5 kg |
| Sensör Yuva Sayısı | 2 |
| RoHS | RoHS 3 (2015/863/EU) Uyumlu |
| REACH | REACH (EC 1907/2006) (25/06/2025, 250 SVHC) Uyumlu |
| DFARS | Özel Metaller COTS Muafiyeti |
| Menşe Ülke | Almanya |
| Schedule B | 848790.0080 |
| ECCN | EAR99 |
Yanlış hizalanmış parçalar ve diğer küçük uyumsuzluklardan kaynaklanan sıkışmaları ve yavaşlamaları azaltmak için bu cihazları tutucunuza ekleyin. Hafifçe esnemelerini sağlayan sıkıştırma yayları sayesinde, tutucunuzun parçaları güvenilir bir şekilde kavraması için uyum sağlamasına yardımcı olurlar. Bir parçayı taşırken olduğu gibi, tutucunuzun sabit kalması gerektiğinde bu cihazları yerine sabitlemek için basınçlı hava uygulayın. Makine bakımı ve otomatik montaj için idealdir. Bunları robotunuz ile tutucunuz arasına monte edin. Hepsi standart ISO montaj desenlerine sahiptir, bu nedenle FANUC CRX, Universal Robots (UR) ve diğer yaygın robot kollarıyla uyumludur.
Bu cihazların tamamen uzandığını veya geri çekildiğini algılamak için bir sensör (ayrı satılır) ekleyin. Bu bilgiyi, robotunuzun döngüsündeki bir sonraki adımı tetiklemek için kullanabilirsiniz. Z ekseni cihazları, her konum için ayrı bir sensör gerektirir.
Kilitleme kuvveti, robot kolunuz hareket ederken bu cihazları sabit tutan kuvvettir. Yükü taşırken cihazın kaymasını önlemek için, robot kolunuz çalışma döngüsü boyunca hareket ederken kilitleme kuvvetinin yükün oluşturduğu kuvvetlerden daha büyük olduğundan emin olun.
Kısmen farklı yükseklikteki parçaları işlemek için tutucularınızın yukarı ve aşağı ayarlanması gerektiğinde bu cihazları tercih edin. Ayrıca bir parçayı yuvaya presle takmak için de kullanışlıdırlar; bu cihazlar, çarpışma hataları gibi hataları önlemek için sıkıştırılabilir. Bunları basınçlı hava ile uzatılmış veya geri çekilmiş olmak üzere iki konumda kilitleyebilirsiniz.